
Applied mathematics has always fascinated me because it’s all about solving the most simple problems in the most efficient way. Optimization, for example, is one of the most useful problem people commonly encounter. The premise is simple: Given some number of independent variables that govern some dependent variable, what is the choice of the values for the independent variables that result in the lowest (or highest) possible value for the dependent variable? For example, let’s say you own a shop. As the shop owner, you have the power to vary the number of items you have stocked, the prices of those items, the number of employees you have, etc. The dependent variable here is the amount of money you earn. So, what is the correct number to place all these variables at to ensure the highest profit? An entire branch of mathematics is dedicated to solving this very type of problem.
Let’s present a toy version of this problem. Suppose you have some scalar function 



So, although a brute-force method is guaranteed to find the global optimum, it is impractical to implement. A gradient descent method is guaranteed to find a local optimum, but has no way of checking if it is actually the global optimum. What we need is something in between – a method that doesn’t search the whole space of the problem but also doesn’t fall into the trap of being stuck in the first local optimum it finds. Simulated annealing is one of the many approximation methods developed to address this problem. The basic principle behind this algorithm is that it will tend to find local optima, but there will always exist some probability that it will sometimes accept a poorer choice, i.e. something not optimal. This is the way that it avoids being trapped in local optima – there will always be a chance that it will jump out and continue searching for a better optimum. The mathematical formulation of this algorithm provides a quantitative way to balance the costs of leaving a local optimum with the benefits of perhaps finding a better optimum. In this post, we will apply the simulated annealing algorithm to our simple case of finding the global minimum of a function of one variable,
- Choose a random
. Initialize the temperature parameter
.
- Evaluate
.
- Find a neighbor of
.
- Evaluate
.
- If
, then
, then compute
. Then
. Otherwise, keep
- Reduce the temperature parameter
One interesting thing you’ll notice is the presence of a temperature parameter. This is what gives simulated annealing its name – in metallurgy, annealing is a method to slowly cool a system so that the system reaches an equilibrium state. In our algorithm, the higher the temperature, the greater the probability that we will escape a local optimum. We want to start off with a high temperature so that we can quickly explore the function landscape at the beginning, but then gradually lower the temperature as the algorithm progresses so we can eventually settle down into the best optimum we can find. Common cooling schedules include a linear cooling schedule (

Neighbor function: How do we determine
def neighbor(state_vector,solution,neighbor_interval):
# Given a state vector, this function returns a neighbor of the given solution.
neighbor_solution = 0
while neighbor_solution < len(state_vector) - neighbor_interval or neighbor_solution < 1:
neighbor_step = random.randint(-neighbor_interval,neighbor_interval)
neighbor_solution = solution + neighbor_step
return neighbor_solution
The 



Cost function: This is the function that evaluates
def cost(solution,cost_function):
# This function returns the cost of a solution.
cost_solution = cost_function[solution]
return cost_solution
The 
Acceptance probability function: This function provides the probability that we accept a worse solution, i.e. in Step 5 in the algorithm. This should be a function of the two solution evaluations and the temperature, i.e. 

def acceptance_probability(old_cost,new_cost,temperature):
# This function returns the acceptance probability given the delta cost and temperature.
delta_cost = new_cost - old_cost
acceptance_probability_solution = math.exp(-delta_cost/temperature)
return acceptance_probability_solution
The main loop of the function, following the steps in the simulated annealing algorithm, looks like this:
temperature = T_start # initialize temperature
solution = random.randint(0,len(state_vector)-1) # generate random starting value
while temperature < T_end:
# try a new solution
new_solution = neighbor(state_vector,solution,neighbor_interval)
new_cost = cost(new_solution,cost_function)
old_cost = cost(solution,cost_function)
ap = acceptance_probability(old_cost,new_cost,temperature)
if new_cost random.random():
solution = new_solution # accept only sometimes if new cost higher
temperature = temperature*exp_cooling_factor # update the temperature
Note that we use an exponential cooling schedule for the temperature. The last thing we need is some way to generate the 1-D function. This is a short piece of code that generates a 1-D function with realistic peaks and valleys using random walks and a running mean smoothing method:
def generate_data(length,start,probability,file_name,smooth_flag,smooth_window):
data_array = np.zeros(length)
data_array[0] = start
for i in range(1,length): # do a random walk to generate some data
if random.random() < probability:
data_array[i] = data_array[i-1] + 1
else:
data_array[i] = data_array[i-1] - 1
if smooth_flag == 1: # do running mean smoothing to make more natural peaks
smooth_step = smooth_window - 2
for i in range(smooth_step,length-smooth_step):
window_sum = 0
for j in range(-smooth_step,smooth_step+1):
window_sum = window_sum + data_array[i+j]
data_array[i] = window_sum / smooth_window
return data_array
The full code, provided at the end of this post, also saves the trajectory towards the final solution so we can visualize it with graphs. As an example, we will show the results of one run of our simulated annealing code:
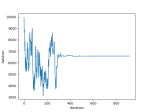
The algorithm correctly found the global minimum, x = 6590, and converged after about 300 iterations. Note that the function space as a whole is 10,000, so a brute-force approach would have taken 10,000 iterations. An animation showing the convergence of the solution to the global optimum as the temperature changes is also provided below:
Simulated annealing code: simulated_annealing.py
